
รายละเอียดสินค้า
| ไฮไลท์ |
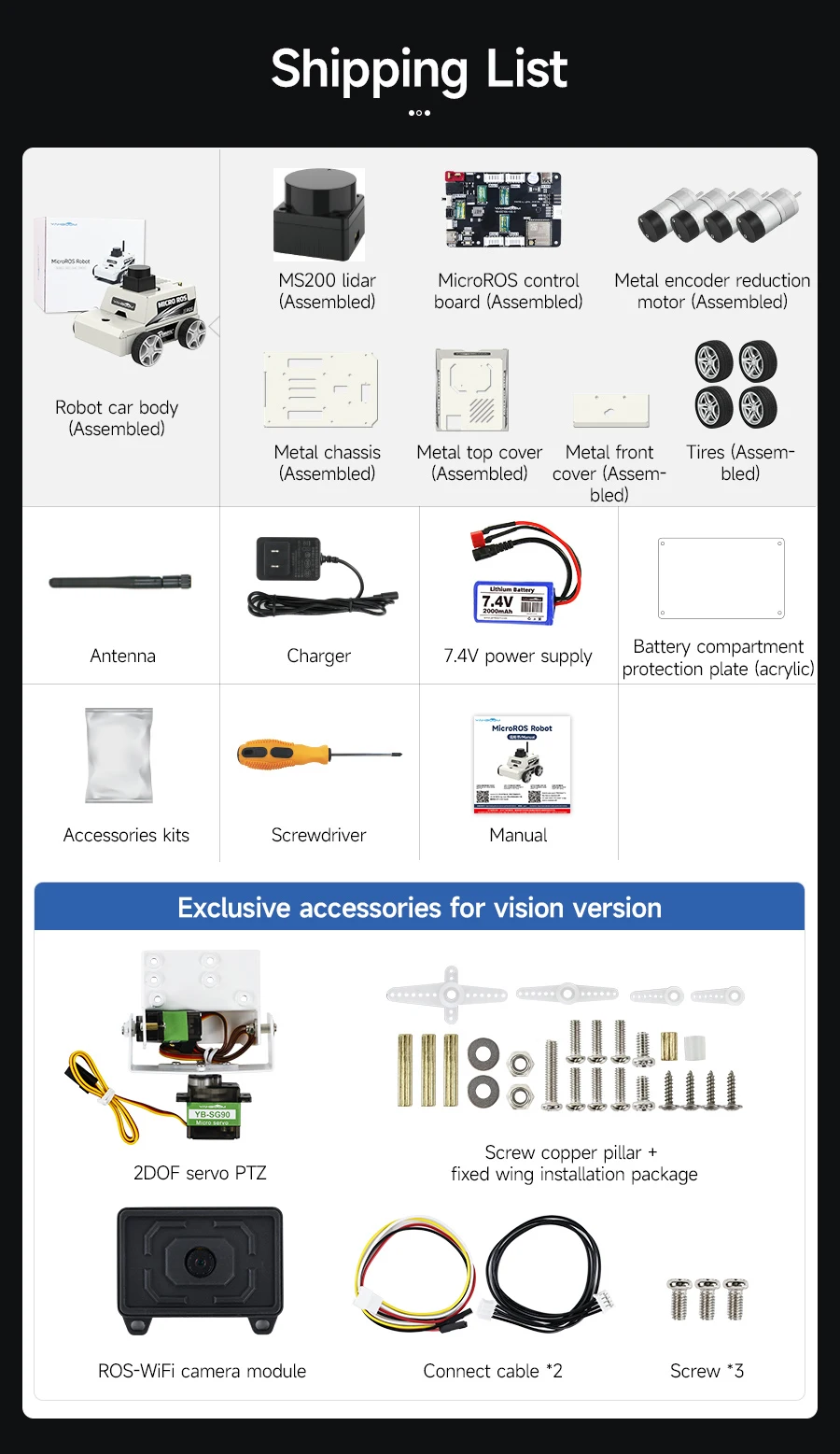
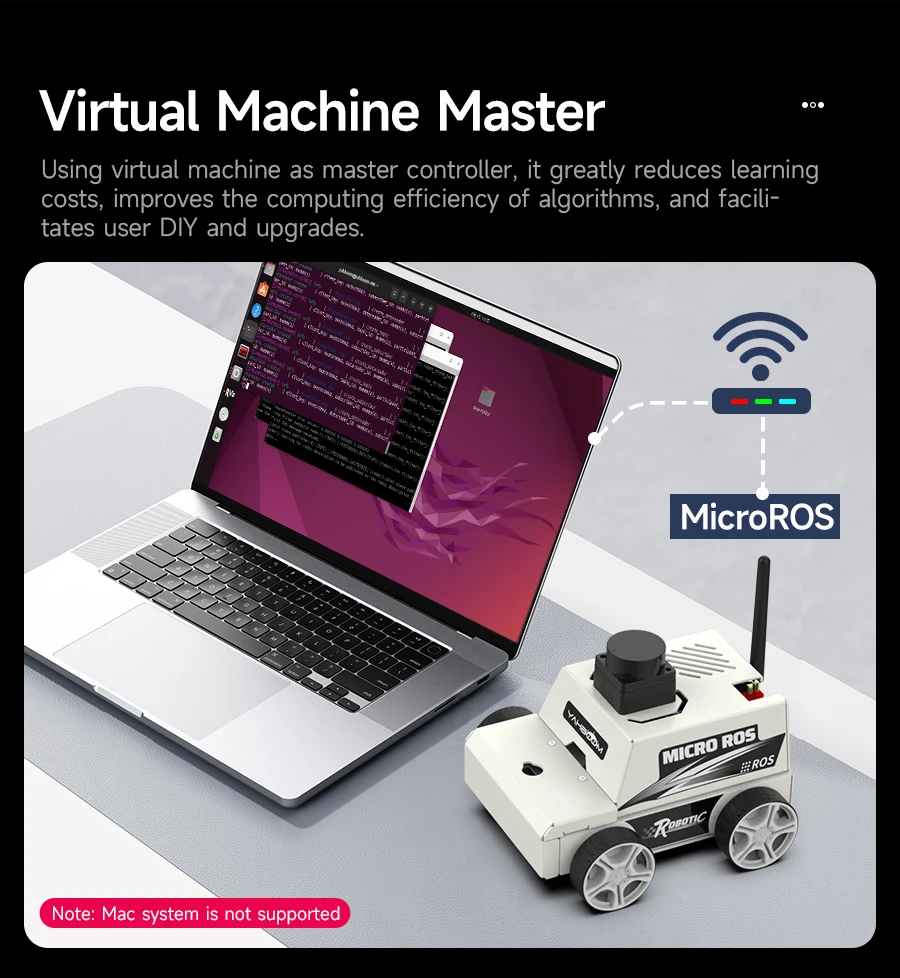
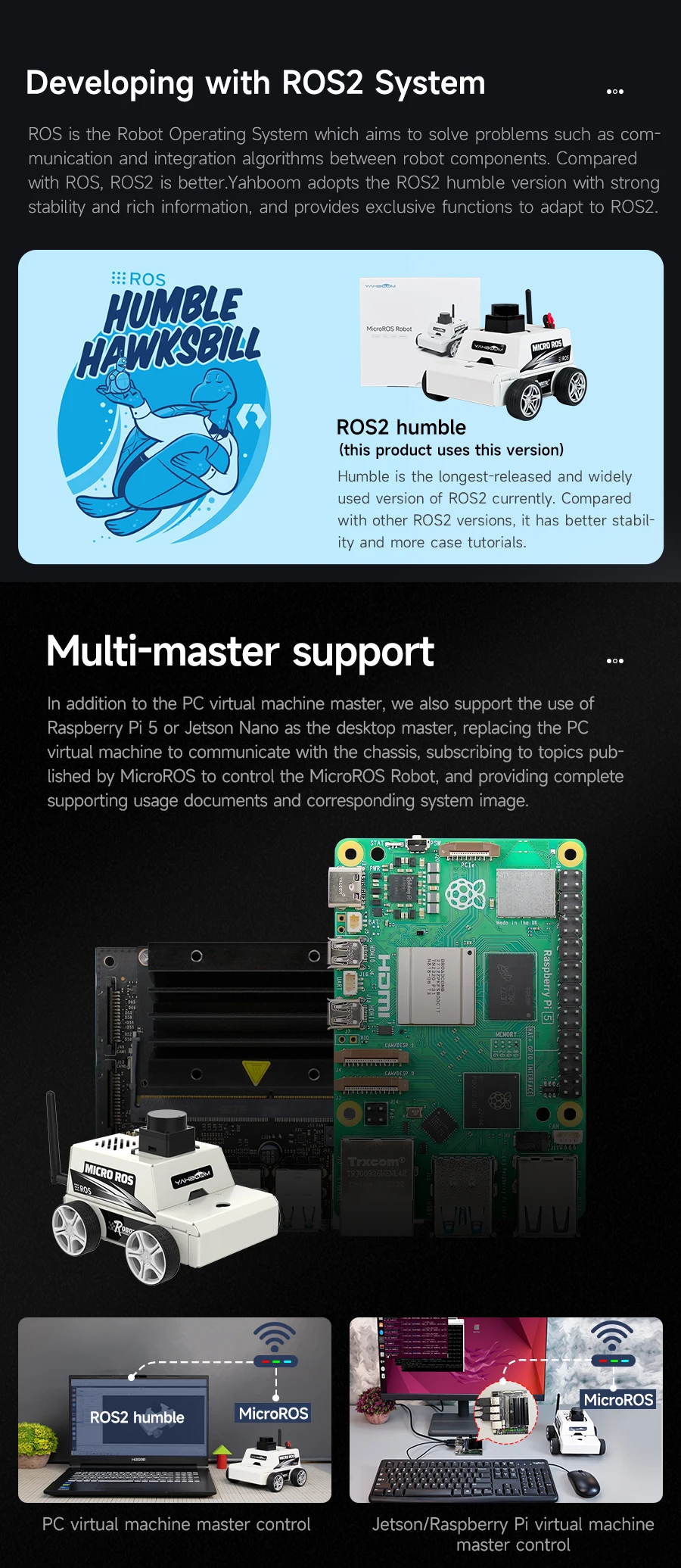
หุ่นยนต์เพื่อการศึกษา MicroRos Robot ROS2 บอร์ดไมโครคอนโทรลเลอร์ ESP32
|
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
จุดเด่น
       |
| เงื่อนไขอื่นๆ |
ซื้อแล้วไม่รับเปลี่ยนคืน
|
| Tags |





















 ธ.กสิกรไทย
ธ.กสิกรไทย
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม